Primary Cue
Overview
Section titled “Overview”The Primary Cue is the foundation of every motion profile. It translates raw vehicle telemetry — accelerations, angular velocities, gravity forces, and slip angles — into platform movement across all six motion axes. Every profile starts with a Primary Cue, and in many cases it is the only motion-generating cue you need.
The Primary Cue handles different vehicle types automatically:
- Driving games — Uses lateral/longitudinal/vertical accelerations for sway, surge, and heave. Uses gravity vector for pitch and roll (tilt cueing). Uses yaw angular velocity for yaw.
- Flight games — Uses accelerations for sway, surge, and heave. Uses angular velocities for pitch, roll, and yaw.
- Rollercoaster and spaceship games — Uses the same mapping as flight games.
- Manual control — Passes manual slider inputs directly through to the platform.
The Primary Cue processes nine axes. The first six are the standard motion axes, and the last three are virtual axes that contribute to the standard axes after processing:
Standard Axes
Section titled “Standard Axes”- Sway — Left/right lateral motion, driven by lateral acceleration
- Surge — Forward/backward motion, driven by longitudinal acceleration
- Heave — Up/down vertical motion, driven by vertical acceleration
- Pitch — Nose-up/nose-down tilt
- Roll — Left/right tilt
- Yaw — Rotation around the vertical axis
Virtual Axes
Section titled “Virtual Axes”- Pitch-Surge — Contributes to the pitch axis using longitudinal acceleration (for driving games) or combined acceleration and gravity (for flight). This creates a pitch sensation from braking and acceleration forces, separate from the gravity-based pitch in driving games.
- Roll-Sway — Contributes to the roll axis using lateral acceleration. This creates a roll sensation from cornering forces, separate from the gravity-based roll in driving games.
- Slip Angle — Contributes to the yaw axis based on the vehicle’s sideslip angle. This adds a yaw cue when the vehicle is sliding sideways (oversteer/understeer). The slip angle is automatically reduced at low speeds to prevent jitter when stationary.
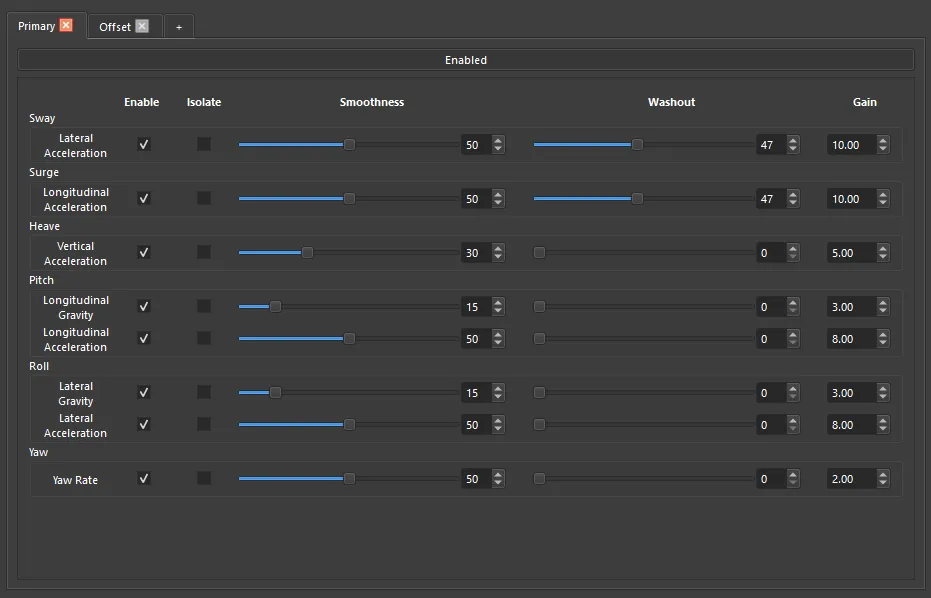
Controls
Section titled “Controls”Each axis has the following controls:
Enable/Disable
Section titled “Enable/Disable”Toggle checkbox to activate or deactivate a specific axis. Disabled axes produce no motion output. Use this to eliminate axes that don’t contribute to your experience or cause unwanted movement.
Isolate
Section titled “Isolate”Temporarily disables all other axes except the selected one. This is the most important tuning tool — it lets you focus on a single axis without interference from the others. Click Isolate on an axis, adjust its settings, then un-isolate to bring everything back.
Smoothness
Section titled “Smoothness”Controls how aggressively the output is filtered (low-pass filtered).
- Higher values (e.g., 500–2000) create smoother, more dampened movement. The platform responds more slowly but motion feels fluid.
- Lower values (e.g., 50–300) allow more direct, immediate response. The platform tracks telemetry more closely but may feel harsh if gains are high.
- The Smoothness Degree (set via the small dropdown next to the slider) controls the filter order — Degree 1 is a gentler filter, Degree 2 is more aggressive smoothing for the same slider value.
- Default car profiles use Smoothness around 300–1000 depending on the axis.
Washout
Section titled “Washout”Controls how quickly motion returns to the neutral (center) position. This is a high-pass filter.
- 0 (default recommended) — No washout. The platform stays wherever the telemetry commands it.
- Higher values — The platform returns to center more aggressively after motion events. Useful if your platform has limited travel and you need it to recenter quickly, but can feel unnatural.
Multiplier for motion intensity on this axis. Higher values produce stronger motion; lower values produce subtler motion.
- Default car profiles typically use gains around 3.0–5.0 for accelerations and 3.0 for angular axes.
- Adjust gain to match your hardware’s travel capabilities and your personal comfort level.
- If motion feels too intense, reduce gain before increasing smoothness.
Input Limit
Section titled “Input Limit”Caps the maximum telemetry input value before processing. This prevents extreme telemetry spikes (e.g., crashes, physics glitches) from commanding unreasonable motion.
- For acceleration axes (sway, surge, heave), typical values are 10–20 m/s².
- For angular axes (pitch, roll, yaw), typical values are 10–120 depending on the game and vehicle type.
- Soft Input Limit (toggle): When enabled, input values approach the limit gradually using a smooth curve rather than a hard cutoff. This creates a more natural feel at the edges of the input range.
How It Works — Conceptual Overview
Section titled “How It Works — Conceptual Overview”For each telemetry frame, the Primary Cue:
- Maps telemetry to the nine-axis array based on vehicle type (car, aircraft, etc.)
- Applies input limits to cap extreme values
- Applies gain to scale the motion intensity
- Applies washout (high-pass filter) to remove sustained offsets if configured
- Applies smoothing (low-pass filter) to remove high-frequency jitter
- Enables/disables axes based on toggle state
- Combines virtual axes into the six standard axes (e.g., Pitch-Surge adds to Pitch, Roll-Sway subtracts from Roll, Slip Angle adds to Yaw)
- Adds the result to the current platform position from other cues
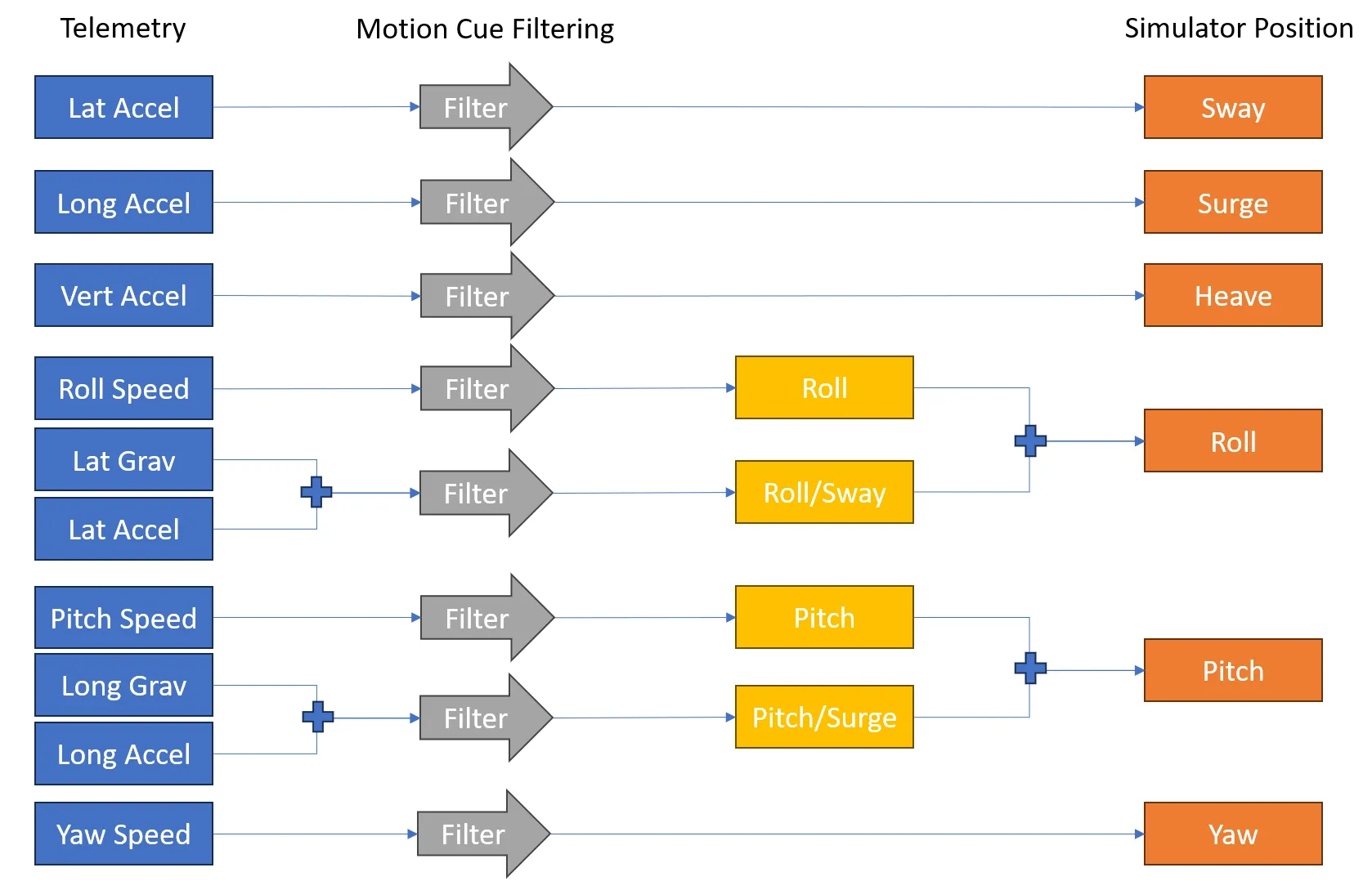
Flight Game Telemetry Flowchart
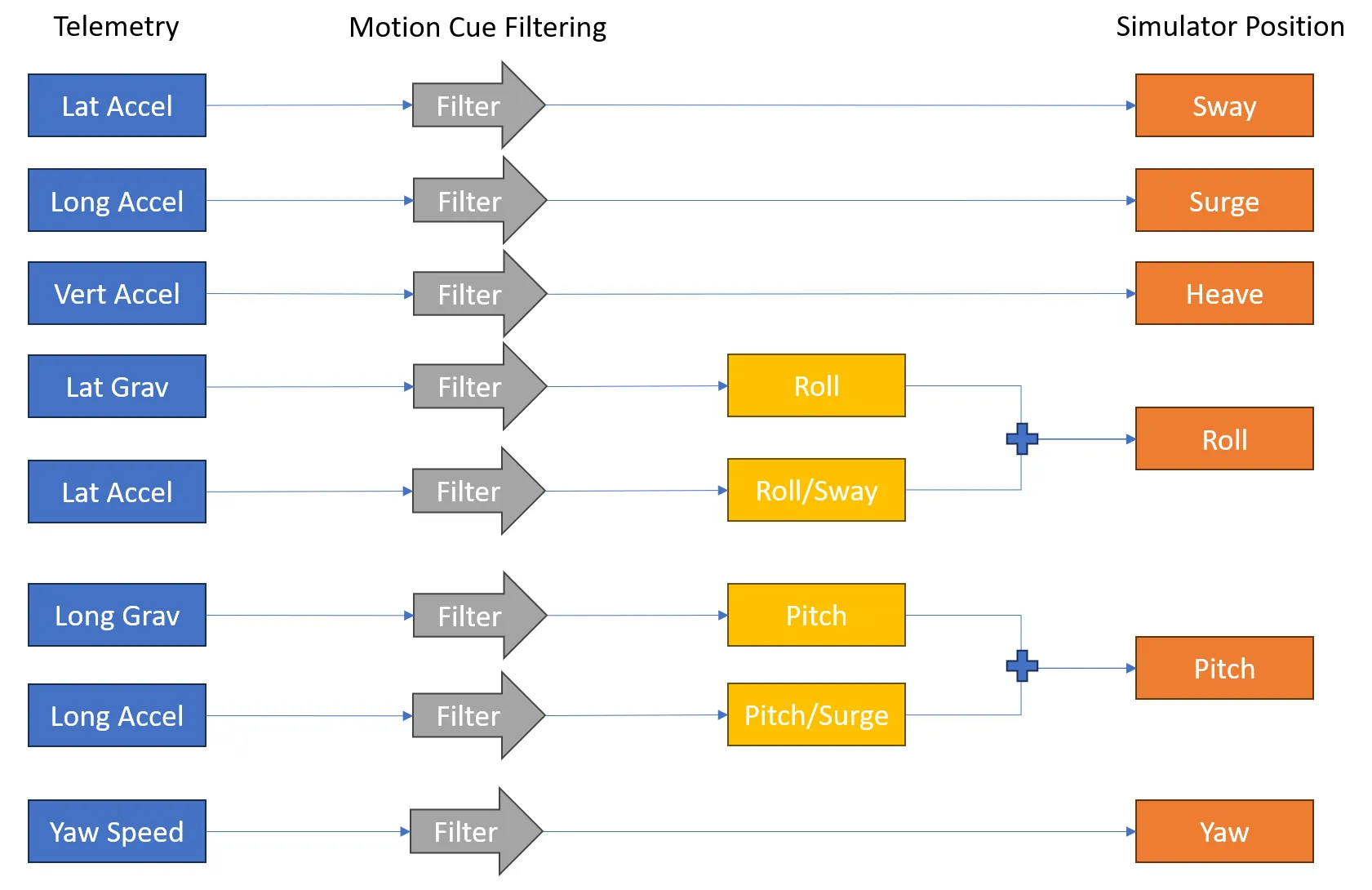
Driving Game Telemetry Flowchart
Vehicle Type Differences
Section titled “Vehicle Type Differences”Driving Games
Section titled “Driving Games”- Pitch and Roll are driven by the gravity vector (tilt cueing) — the platform tilts based on the vehicle’s actual orientation relative to gravity. This produces sustained tilt during cornering and braking.
- Yaw is driven by yaw angular velocity — the platform rotates proportionally to how fast the car is turning.
- Pitch-Surge and Roll-Sway provide additional pitch/roll from accelerations, layering dynamic forces on top of the gravity-based tilt.
Flight Games
Section titled “Flight Games”- Pitch, Roll, and Yaw are all driven by angular velocities — the platform responds to how fast the aircraft is rotating, not its absolute orientation. This is necessary because aircraft can sustain orientations (e.g., banked turns) far beyond what a platform can physically reproduce.
- Pitch-Surge and Roll-Sway combine acceleration and gravity for additional translational-to-rotational cueing.
Interaction with Other Cues
Section titled “Interaction with Other Cues”- Vibration Cue — Adds high-frequency detail on top of the Primary Cue’s output. Tune the Primary Cue first, then add Vibration for fine texture.
- Ground Cue — For aircraft, blends with the Primary Cue based on altitude. The Ground Cue provides a separate motion profile for ground operations.
- Offset Cue — Shifts the neutral position and center of rotation. Applied after the Primary Cue’s output.
- Variant Cue — Applies a gain multiplier to the Primary Cue’s output per vehicle.
- Travel Limits — Clamps the final combined output to the platform’s safe range.
Tuning Tips
Section titled “Tuning Tips”- Isolate one axis at a time — This is the single most effective tuning technique. See the Motion Tuning Guide for a step-by-step workflow.
- Set Washout to 0 — You generally won’t need it. Soft travel limiting handles range management more naturally.
- Start with moderate gains — Begin around 3.0–5.0 for acceleration axes, 2.0–3.0 for angular axes. Increase after establishing a comfortable baseline.
- Use Input Limits to prevent spikes — Set acceleration input limits to 10–20 m/s² for cars. This prevents crashes and physics glitches from producing extreme motion.
- Enable Soft Input Limit — This creates smoother behavior at the edges of the input range compared to hard clipping.
- Tune Pitch-Surge and Roll-Sway independently — These virtual axes let you add acceleration-based pitch/roll on top of gravity-based pitch/roll. Start with them at lower gains than the main pitch/roll axes.
- Reduce smoothness if motion feels delayed — High smoothness values add latency. Find the lowest smoothness that still feels comfortable.
- Changes are real-time — Adjust settings while driving/flying to feel the effect immediately.