Motion Tuning Guide
Primary Cue Tuning
Section titled “Primary Cue Tuning”Start by enabling only the Primary cue in your profile. Disable Offset, Ground, and other contributors for now.
- Isolate a single axis (e.g., sway/lateral acceleration).
- Set Washout = 0 — you generally won’t need it.
- Set Smoothing moderately low (e.g., under 30).
- Adjust Gain until motion feels ‘right’ to you.
Repeat for surge, heave, pitch, roll, yaw in sequence.
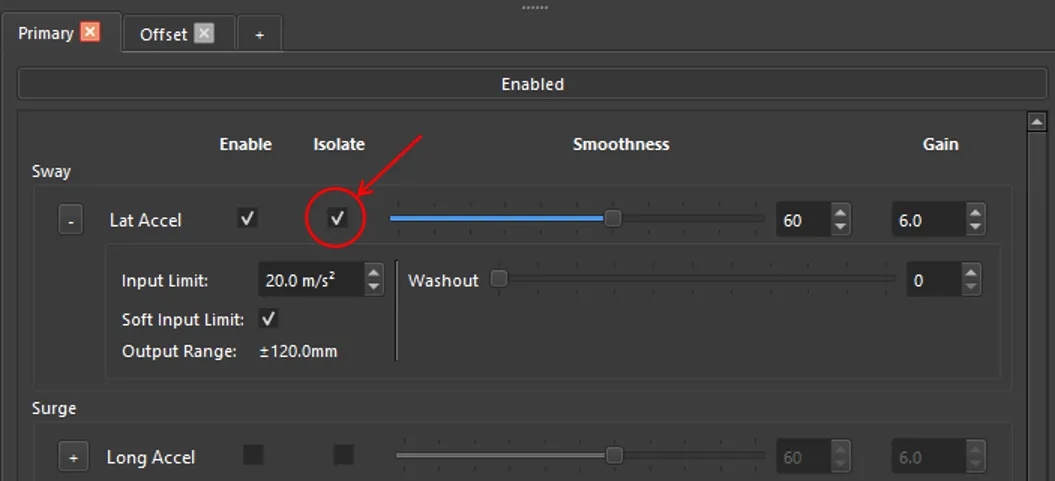
Isolating a single axes’ contributor
Building the Full Profile
Section titled “Building the Full Profile”Once individual axes/contributors feel good:
- Re-enable all contributors.
- Test in typical in‑game situations.
- Expect overall motion intensity to rise when cues combine.
- Dial down gains slightly, or bump smoothing just enough to blend everything together.
- Watch for safety filter or overallocation warnings (see sections below).
Offset Cue: CoR (Center of Rotation)
Section titled “Offset Cue: CoR (Center of Rotation)”Using Offset to shift rotation centers can improve the cues on hexapods:
- Set Yaw CoR forward for better traction loss sensation. This makes it feel like you’re rotating around front tires.
- Move Pitch CoR rearward to align with torso pivot. This helps limit the feeling of raising and lowering during acceleration and braking.
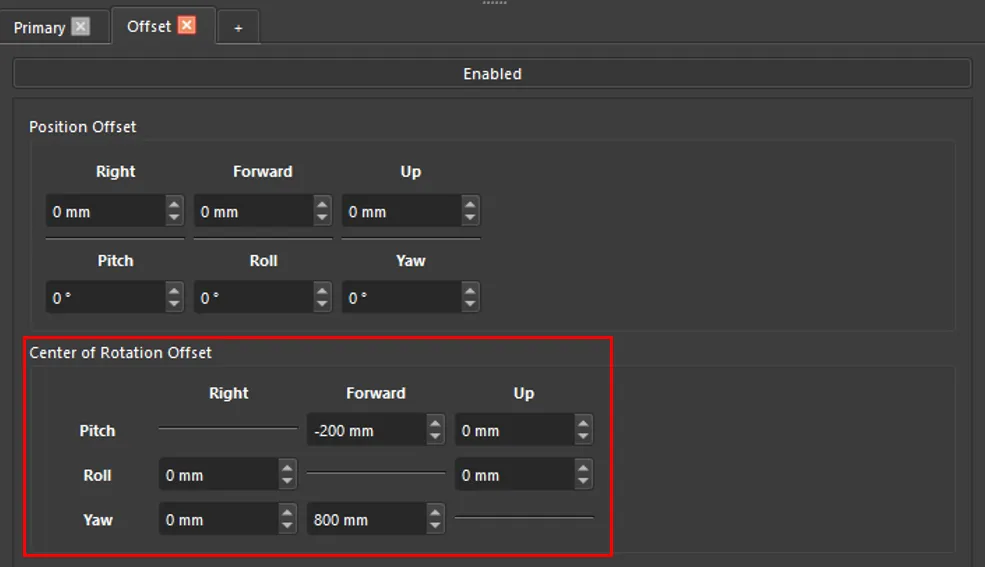
Using Offset Cue to move Center of Rotation
Safety Filter Monitoring & Tuning
Section titled “Safety Filter Monitoring & Tuning”The safety filter protects users by preventing the simulator from generating excessive accelerations or rotations that can feel uncomfortable or unsafe. When incoming telemetry surpasses defined thresholds (default values are typically conservative, such as 3G for translations and 4000 deg/s² for rotations), the safety filter activates, capping motion outputs and logging warnings. Adjusting gains, smoothing, or input limits can prevent frequent activation, ensuring a comfortable and immersive experience without compromising safety.
Enable DEBUG verbosity in Settings tab to track safety filter activations. Logs will show lines like:
Acceleration values (current/limit): sway: 7.06 G/6.00 G, pitch: 6689.56/5000 deg/s², roll: 8464.63/5000 deg/s²INFO – Safety limit exceeded on axis: pitch, roll, sway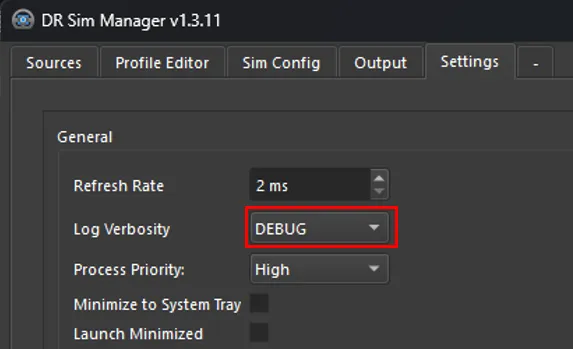
Log Verbosity Dropdown in Setting Tab
Default thresholds are ~5 G and 5000 deg/s². When triggered:
- Reduce Gain on offending axis in Primary cue.
- Or Increase Smoothing.
- Or Lower Input Limit for that axis (see next section).
These changes prevent triggering the safety filter, preserving both comfort and safety.
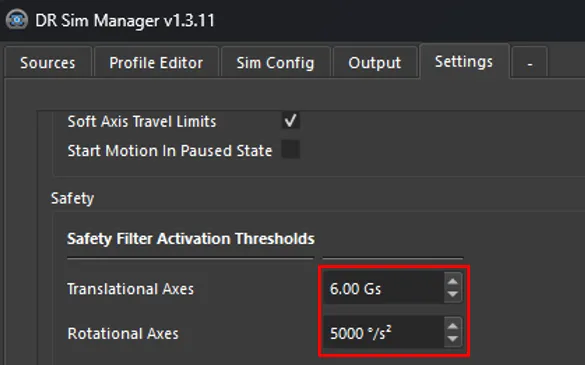
Safety Filter Threshold Settings
Input Limit
Section titled “Input Limit”The input limit restricts telemetry inputs for each motion axis to realistic, vehicle-specific maximums, preventing exaggerated simulator movements during extreme events like crashes. By setting appropriate limits (e.g., 10–20 m/s² in acceleration contributors for typical cars), you maintain a realistic and immersive feel while reducing the risk of triggering safety filters.
Use Input Limit to cap incoming telemetry values:
- Set limits to typical vehicle dynamics (e.g., surge/sway ~10–20 m/s²).
- This prevents infrequent spikes from commanding extreme motion.
- Helps keep the Primary cue effective while avoiding unreal intensity.
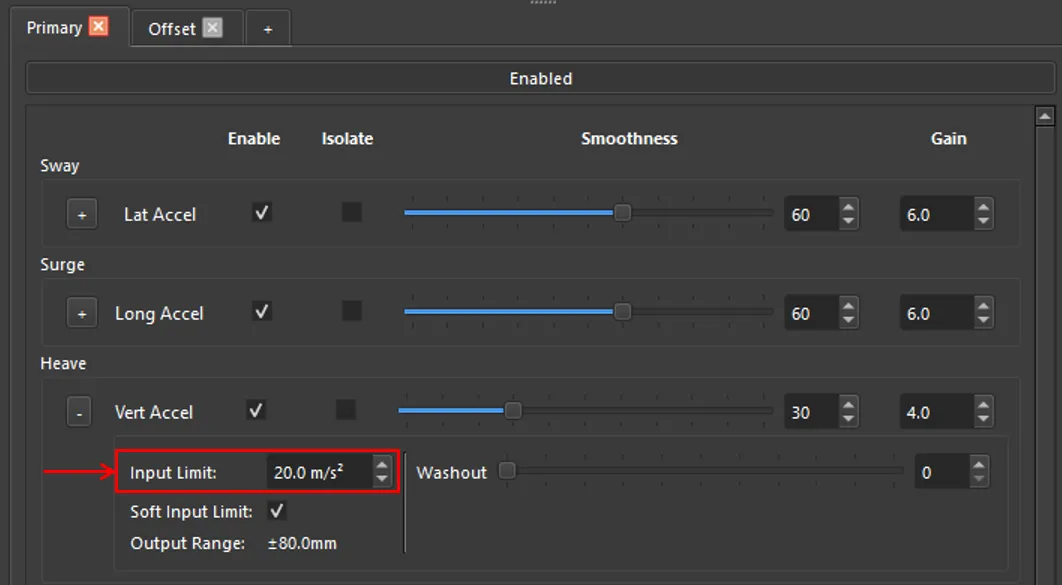
Adjusting Input Limit on the Vertical Acceleration contributor to Heave
Overallocation Factor
Section titled “Overallocation Factor”The overallocation factor ensures that quadpost motion simulators maintain stable contact on all four actuators, preventing a condition known as “tripoding,” where one actuator lifts off the ground due to uneven loading. Overallocation distributes actuator travel across axes proportionally, but frequent overallocation warnings indicate overly aggressive motion settings, which can break immersion. Adjusting gains or increasing smoothing, especially on heave, pitch, and roll axes, helps reduce these warnings, resulting in smoother and more stable motion cues.
📌 Recommendation: Tune motion (gain/smoothing) so overallocation warnings do not appear in DEBUG logs. This ensures smooth and stable simulation without breaks in immersion.
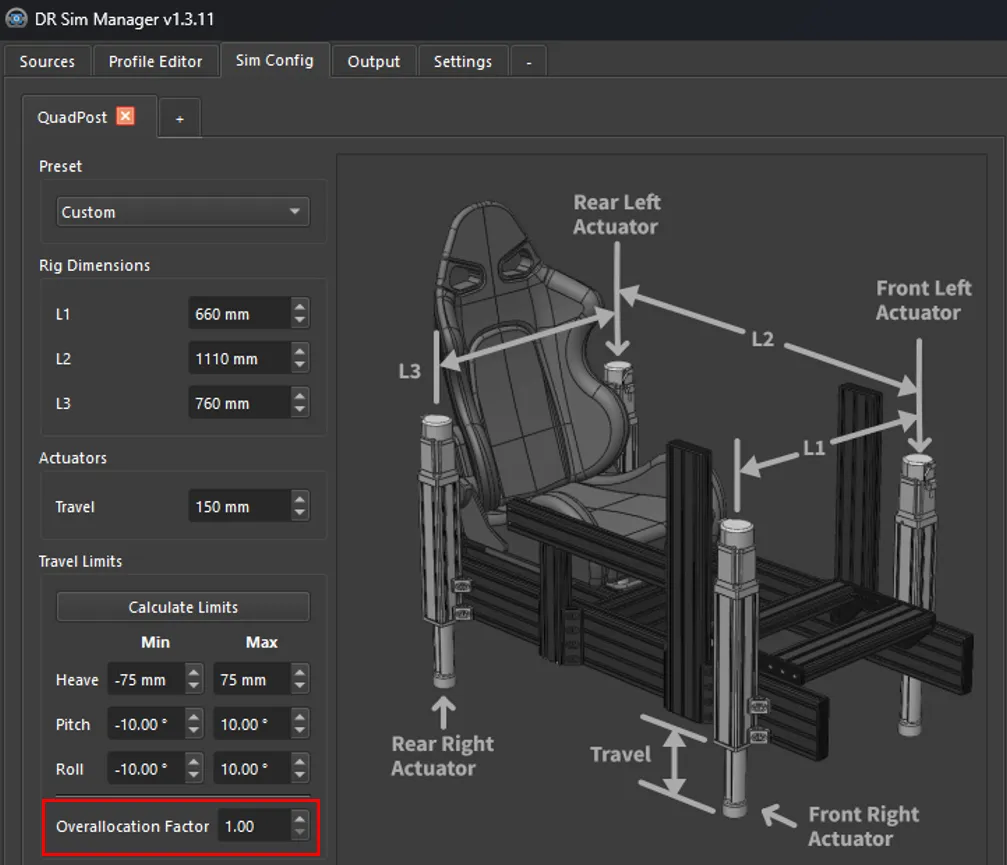
Overallocation Setting on Quadpost Simulator Type
Overall Tuning Order (Checklist)
Section titled “Overall Tuning Order (Checklist)”- Primary, one axis at a time – washout = 0, smoothing ~<30, adjust gain.
- (Optional) Add Offset cue – tune CoR for yaw/pitch.
- Enable everything – test in‑game.
- Adjust gains/smoothing to manage intensity.
- Watch Safety Filter logs – tune offending axes.
- Apply Input Limits to avoid spikes.
- Monitor Overallocation warnings – tune until they stop.
- Final polish — ride, fly, crash, and refine for comfort and realism.
Debugging Tips
Section titled “Debugging Tips”- Use DEBUG verbosity to reveal safety filter and overallocation triggers.
- Check logs for specific axis labels.
- Adjust gains/smoothing/input limits rather than the safety threshold unless you purposefully want a more aggressive experience.